Quadcopter
20 May 2014
As a gift to myself for finishing grad school, I ordered all the parts I needed to make a quadcopter. Inspired by the amazing videos by TeamBlackSheep, David Windestål and others, the long term goal is to make a compact quad capable of transmitting video from an on-board camera in real time, and be piloted in first-person-view (FPV). I love the idea of goint to visit places inaccessible otherwise, of course without putting other in danger or invading their privacy.
After some initial tuning, I've got a flying quad ! Mounting a GoPro camera on it let me record the following video. I'm piloting both in line-of-sight and in FPV (first person view), which means transmitting the live video from the on board camera to LCD goggles.
Here's the bill of materials I needed to get flying.
- HobbyKing Q450 V3 frame
- RC-timer HP2212 1000kv motors (4x)
- HobbyKing Blueseries 30A Electronic Speed Controller (4x)
- HobbyKing 8x4.5 slow flight propellers (4x)
- HobbyKing Multiwii 328p flight controller and Bluetooth module
- HobbyKing Zippy Flightmax 4S 30C 5000mAh and 2800mAh LiPo batteries
- Amazon Integy C23212 Lipo Voltage Checker/Warning Buzzer
- HobbyKing Turnigy Accucel-6 battery charger
- HobbyKing Turnigy 9X Radio Transmitter and Receiver
- HobbyKing 1500mAh LiFe transmitter battery
Putting it together was quite simple, it's really like a DJI Flamewheel 450 kit, except with cheaper components, and there are tons of videos and manuals around the web. It's quite amazing to see it fly after only a couple hours spent on building it.

You'll notice that the top plate looks quite different from the other components, it's because I broke the original fiberglass plate in a crash and I had to cut a new one in an aluminum sheet. It's so convenient to have access to a waterjet, I quickly designed a replacement and the quad was flying again the next day ! I uploaded the files on the Thingiverse.
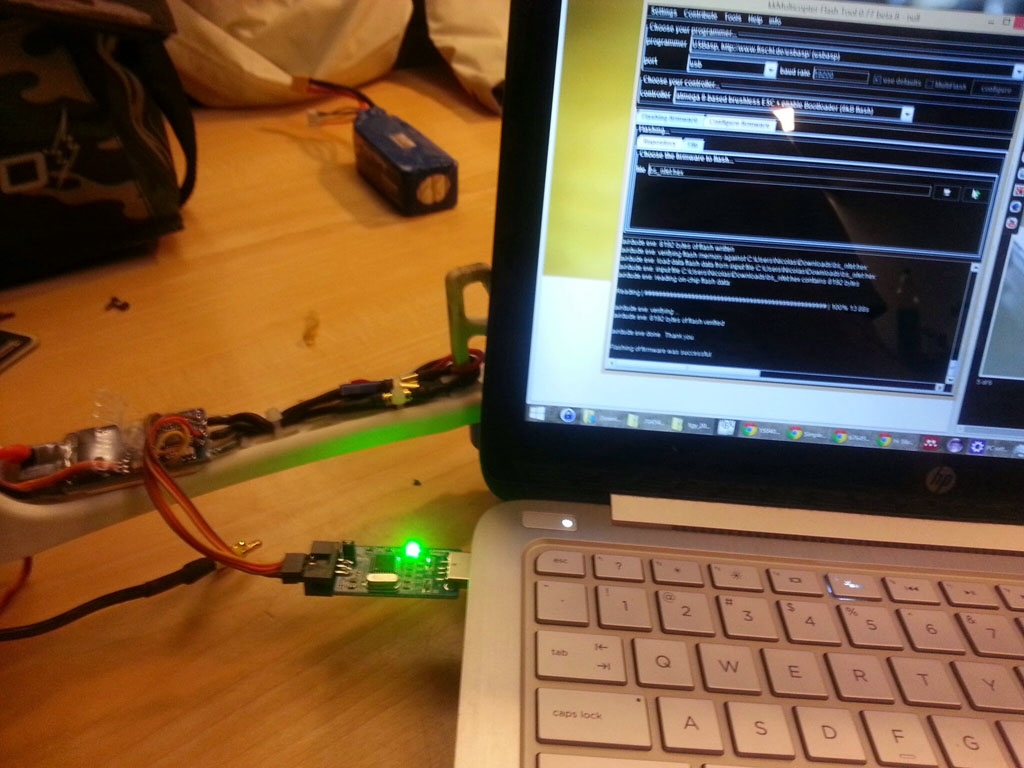
To fix some issues with the stability of the quad, I also had to flash the electronic speed controllers with a new firmware (latest SimonK hex file). It really improved the performance, the high pitch hissing noise that I used to hear disappeared completely, leaving only the melodious humming of the propellers (my understanding is that the new firmware uses a higher frequency pulsed width modulation, outside of the audible range). I used the usual USBavr programmer and followed these instructions for wiring. I flashed with the KKMulticopter Flashtool.
Other projects